


Scandinavian Drone supplies professional drone solutions for inspection, surveying, mapping, research, and more. With offices in Norway and Sweden, the company’s offerings include hardware, software, training, rentals, maintenance and repair. The company discussed its first experiences with topo-bathymetric lidar in a presentation during the YellowScan Lidar Convention 2024, the company’s two-day user event in France.
The YellowScan Navigator is a bathymetric lidar system for drones. After its release earlier this year, the company noticed a lot of interest in the product from customers. At the same time, people were skeptical that it would not work in Scandinavian waters, as these are often dark and murky. A demo event in southern Sweden was scheduled as soon as a demo unit was received.
System setup and demo locations
Multiple harbor areas were chosen for data capture with the system. The first area was a harbor with a river mouth where dredging work was done. The demo days showcased the system’s workflow, including data collection and processing. They also provided a chance to gain experience as Scandinavian Drone as clients had no prior experience with bathymetric lidar. Finally, they enabled a comparison between bathymetric lidar and using multibeam sonar in different scenarios, especially regarding data, workflow, and efficiency.
The drone platform of choice was a Hexadrone Tundra 2, using the UgCS mission planning software from SPH Engineering, and an Emlid Reach RS2 base station. The Hexadrone Tundra 2 drone has a 5kg payload capacity and offers a realistic flight time of 30 minutes with the YellowScan Navigator. Data was captured at a flight altitude of 60m, at a flight speed of 5m/s. A single grid trajectory was flown with an overlap of 50%. The flight time for the first demo project was 18 minutes from takeoff to landing. The area coverage was 400m x 150m = 60.000 m2, and the point density per m2 of the lidar data was approximate 15pts + 15pts (surface + bottom). The system reached a water depth of 7 meters.
The water conditions were relatively clear during winter, with the exception of storms and river outlets. There was mixed bottom reflectivity due to the occurrence of gravel, rocks, and plants. The area where the river enters the sea, the river mouth, was not an ideal condition for data bathymetric capture where melting snow caused sediments from agricultural runoff due to high wind, rainfall, and melting snow. All this resulted in less-than-ideal visibility and bottom reflectivity when capturing bathymetric lidar.
Project results and evaluation
Scandinavian Drone praised the results of bathymetric lidar, as it provides context of what you’re looking at, such as surrounding area including land. It’s something completely different altogether than using multibeam, which only gives you the water bottom. Bathymetric lidar also enables deriving extra information simply by looking at it from different angles and using different visualizations, such as RGB. The intensity view shows bottom surface conditions, such as sand.
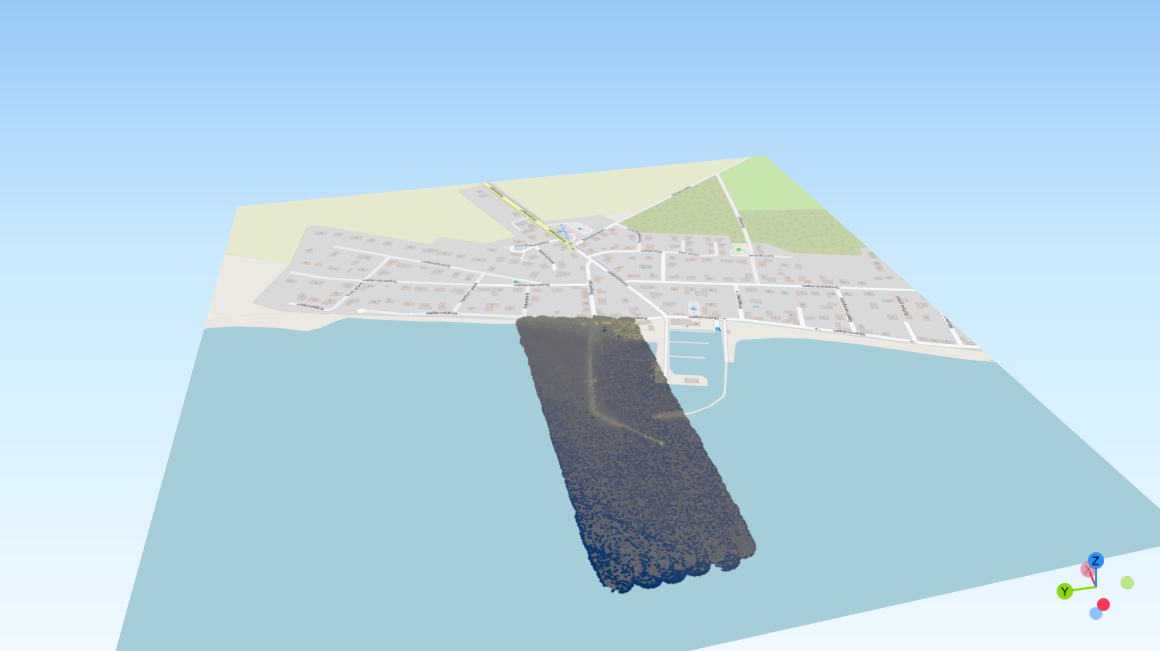
The resulting data can be used for several applications, including digital twin creation of the harbor and surrounding area, or the identification of subsea structures. It’s also beneficial for identifying hazards such as subsea structures, wrecks, and dumped items. Perhaps the most obvious application is environmental management, such as erosion, bottom conditions, and underwater vegetation.


