
During Bentley’s 2016 Year in Infrastructure conference, the company announced a number of updates related to their ContextCapture reality modeling solution.
ContextCapture Now Processes Laser Scans
For as long as it has been available, ContextCapture has generated reality meshes from photographs. This week, Bentley announced that the software will soon accept point clouds as input too.
This means a user can generate a reality mesh from photographs and choose to incorporate laser scanning data in areas where higher accuracy is necessary.
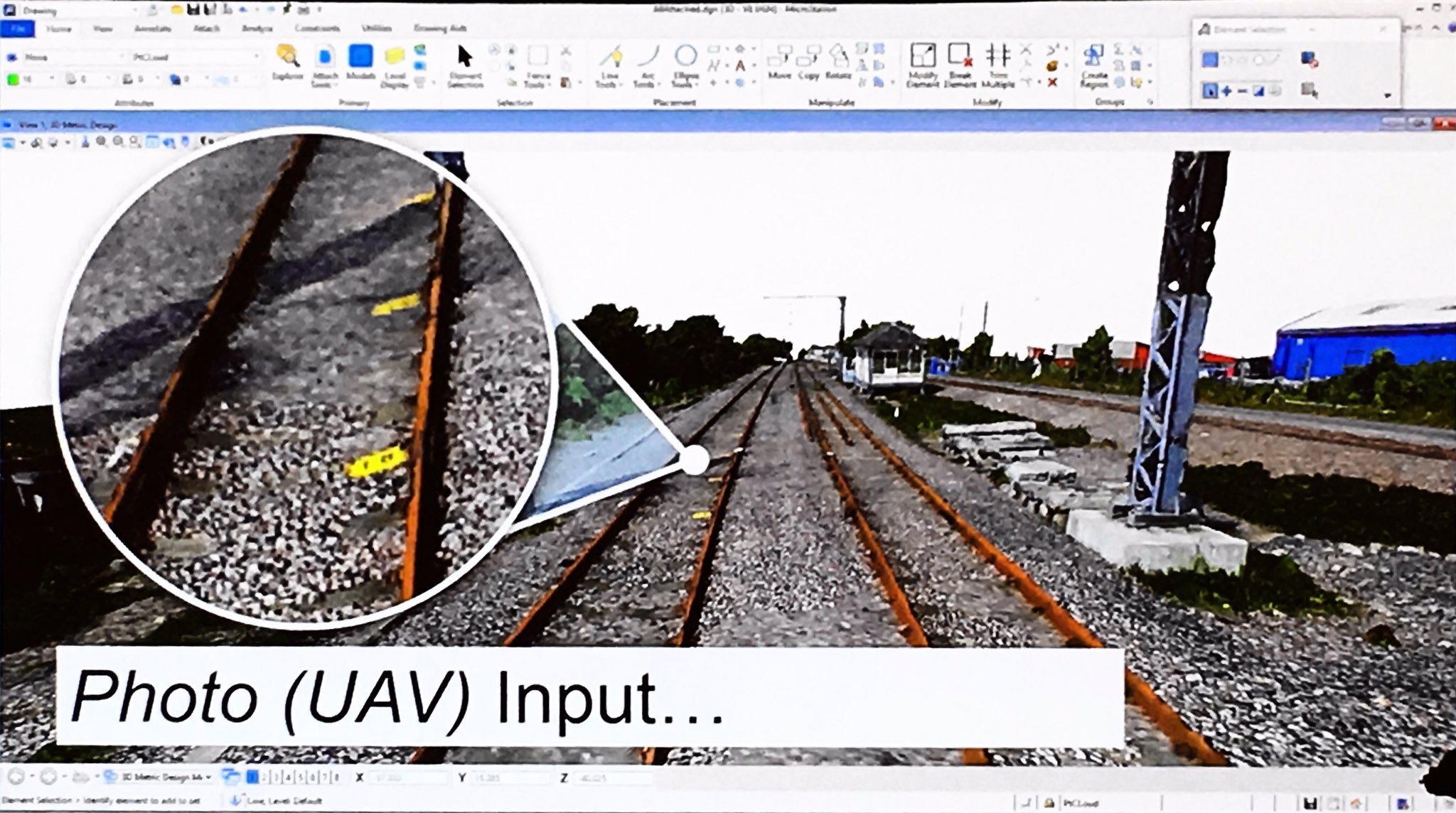
As CEO Greg Bentley explained during a media day presentation, a survey of rail conditions could use laser scans of the rail itself, and use UAV photographs of the surrounding area for faster coverage and additional visual detail.
Since the final product is still a reality mesh, this “hybrid input” will exploit the benefits while avoiding certain weaknessess, including large file sizes and lack of intelligence.
Bentley says this will make the ContextCapture solution compelling across a range of sensors, asset characteristics, and capture conditions. The update will be available in December 2016.
ContextCapture Integrated Across Bentley’s Portfolio
Citing the growth of 3D capture as one of the major technological trends this year, Bentley says that reality modeling is becoming an expected part of any infrastructure project delivery. In response, the company continues to integrate the ContextCapture technology across their software portfolio.
OpenRoads Designer, for instance, will be updated to take advantage of new Descartes functionality for processing reality meshes. Users will be able to clip a digital terrain model in Descartes and use it as the basis for roadway design. Descartes can also be used to recognize ground features in reality meshes semi-automatically, including vegetation and breaklines.
SPAR 3D will continue reporting from Bentley’s Year in Infrastructure, so keep an eye out here for further updates throughout the week.


