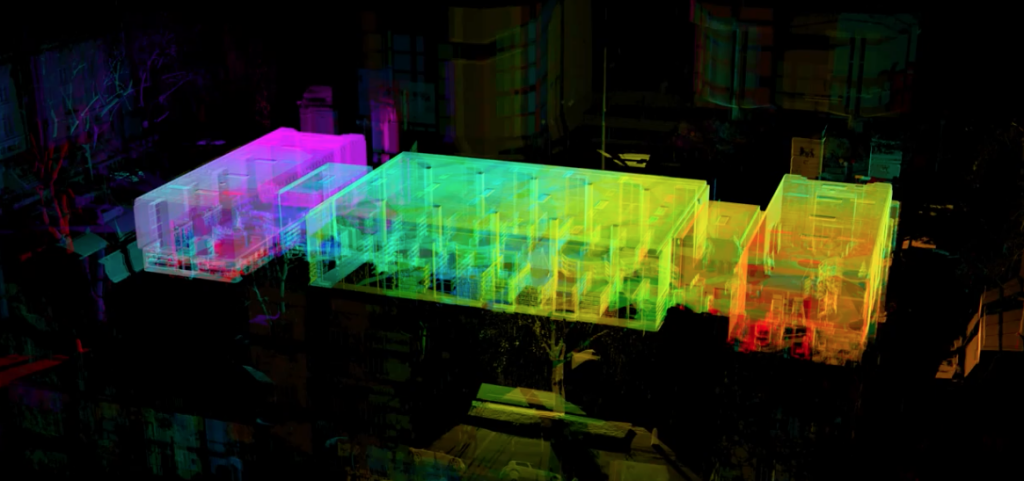
3D scanning has moved from static traditional stationary laser scanning to mobile mapping and SLAM, and can also now be captured by UAVs or even the backs of other autonomous robots. To make all this captured data usable, however, requires better methods for registering and processing point clouds. Integrating data types and also shortening the time between capture and processing are key challenges to overcome. One potential solution is cloud-based processing, which offers several advantages to professionals navigating the new world of hybrid and sensor-fusion workflows
Charlie Cropp, Head of Sales and Business Development at Correvate, has seen the acceleration of reality capture technology and knows that this need is a growing one.
“I've seen laser scanning go from being 1000 points a second data capture - in the very early days - through to some hardware manufacturers delivering 2 million points a second. That’s such a huge opportunity in terms of how we can capture more data. But the big thing is how we can work with that data efficiently?”
The answer is in the cloud.
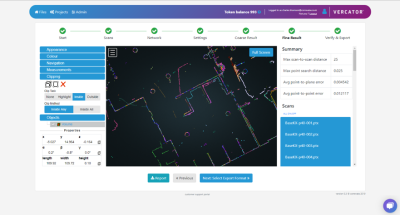
Vercator Cloud is a cloud-based platform for processing point cloud data. The technology originated from a research project at the Department of Electrical Engineering at University College London, and the product was commercialized under a company called Correvate in 2017. In July 2019, they launched their cloud registration service.
Learn more about Vercator Cloud >
Hear from Cropp in the below video interview, where she shares how Vercator Cloud can offer an advantage to professionals as they begin to navigate hybrid and sensor-fusion workflows.