
Autonomous cars require a huge amount of data to function properly. They’re loaded with an array of advanced sensors gathering data on local road dimensions, weather conditions, and traffic, but also large, detailed, and accurate global maps. As a team at MIT’s CSAIL explains in a new paper, the problem is that these maps aren’t feasible to maintain outside of small urban areas. This makes a huge percentage of roads in the US—not to mention worldwide—a dicey proposition for autonomous vehicles.
The solution, though not quite “mapless,” dumps the metric high-resolution global maps used by virtually all leading autonomous driving solutions, opting instead to use a simpler, crowdsourced topographical map from openstreetmap.org. The key breakthrough was the team’s realization that “although GPS data is not precise enough for autonomous driving, it is precise enough to enable topological localization.”
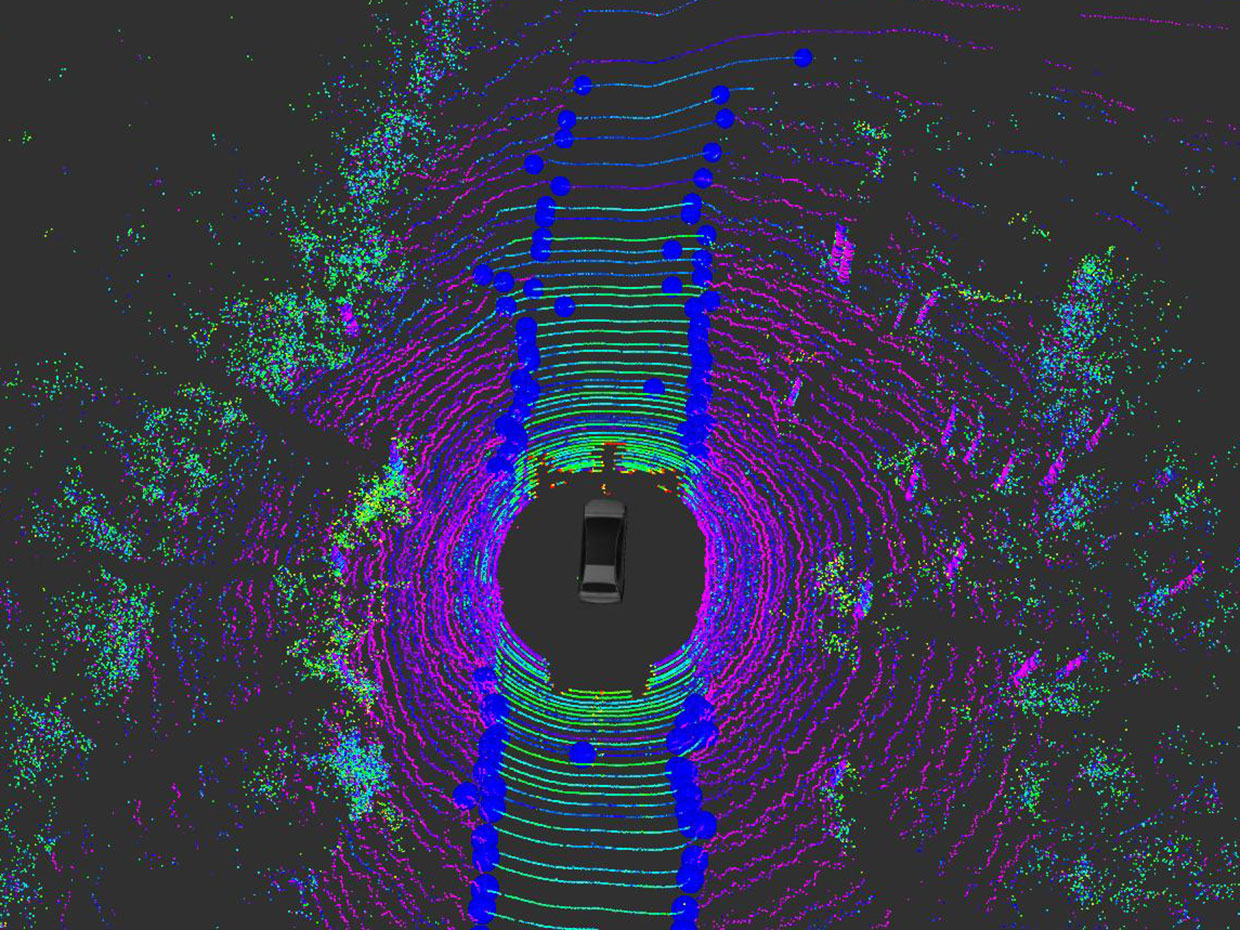
That global localization system (is that any oxymoron?) works in tandem with a small-scale localization system built on good old-fashioned lidar. That small-scale system uses each current road boundary estimation as the basis for the next estimation, and fuses this data with IMU and odometry data from the vehicle in a probabilistic framework. It’s surprisingly efficient, both lean enough to run on a standard PC at 5Hz and capable of estimating the shape of the road up to 35m in advance of the car at speeds over 67 mph. In other words: it works.
For more information, read the original paper here.


