
Researchers at the Stanford Computational Imaging Lab have developed a system that can capture 3D images of objects hidden around a corner. The team says it could be a breakthrough for autonomous vehicle applications.
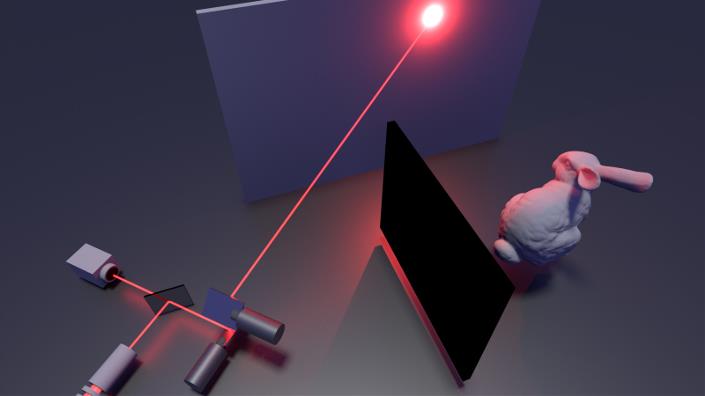
Here’s how it works: The imaging device shoots laser pulses at a wall, which reflects those pulses onto an object around the corner (in the image, that object is… a bunny). Next, some photons from the pulse bounce back off of the object, ping off the wall, and then travel back to a device, where they’re picked up by a sensitive photon detector.
If this sounds somewhat familiar, it’s because a team a Hariot-Watt University developed a similar-sounding tool in December of 2015. The difference is that, though both systems are designed to measure an object hidden around a corner, they differ in what they’re measuring: The Stanford solution uses an algorithm to image the object in three dimensions, and the Hariot-Watt system to ranges and tracks the movement of the object through space.
The reason (explains the latter team) is that no current tool can perform both tasks at the same time, since ranging an object hidden around the corner requires very fast acquisition, whereas capturing the object in 3D requires much longer acquisition times. Indeed, the Stanford team has admitted that the scans currently can take up to two minutes or an hour—far too slow for use in autonomous vehicle applications, and probably regular scanning applications because it would be much faster to, you know, just walk around the corner.
Besides speeding up the acquisition time significantly, the Stanford team hopes one day to adapt their system to use lidar, though they note that this could be challenging since the technology is currently designed to capture only direct reflections.
For more information, you can read the original research in Nature.


